Steel shearing machines are used by manufacturing companies to cut sheet metal, as well as other materials and workpieces, with a straight blade. The sheet metal is secured below the cutting blade, after which the cutting blade drops down to cut through it. There are many different types of shearing machines, however, one of which is an Alligator Shear. Alligator shears contain a straight-bladed cutting tool as well, but they feature a unique alligator-like design that distinguishes them from other shearing machines.
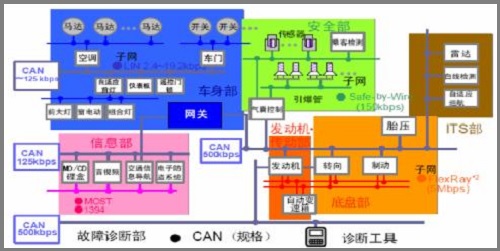

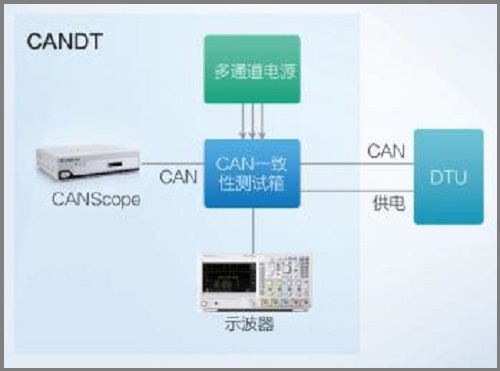
Therefore, in order to ensure the stability of the CAN bus, it is necessary to conduct CAN conformance testing on the vehicle network. As the overall designer of the CAN bus network, what are the contents of the CAN conformance test and how to ensure the stability of the CAN bus through the CAN conformance test? 
Steel Shearing Machine, Steel Shear, Steel Alligator Shear, Steel Guillotine Shear
Jiangyin Metallurgy Hydraulic Machinery Factory , https://www.ecometalsrecycling.com